| |
|
|
Shapes
This component contains algorithms for shape detection in 3D point clouds.
The main functionality is plane detection.
To detect planes in a point cloud given in any of the supported
file formats simply call:
To specify your command you can use various parameters. For a complete list type
The most important parameters are explained here:
This specifies in which scan planes should be detected.
This is for choosing the plane detection algorithm.
Currently the options are
rht | Randomized Hough Transform. |
sht | Standardized Hough Transform. |
pht | Probabilistic Hough Transform. |
ppht | Progressive Probabilistic Hough Transform. |
apht | Adaptive Probabilistic Hough Transform. |
ran | Randomized Sample Consensus (RANSAC) |
For detailed descriptions of the different Hough Transform methods, please refer
to the corresponding publication.
The Hough Transform can be tuned using various parameters. These should to be
specified in the configuration file in bin/hough.cfg
A description of the parameters is given here.
Results
The results of the plane detection algorithm are written to the directory
specified as PlaneDir in the configuration file. For each plane a
file named planeXXX.3d is created, where XXX is the running number of the plane
with leading zeros. The file lists the global 3D coordinates of the convex hull of
the detected plane.
Additionally, a file planes.list is created int the same directory, that lists
all the created planes.
To view the results, the -l parameter of show can be used.
To see a simple example with the data set provided together with the source
code, do
to run the Randomized Hough Transform on the first scan and then
show -s 0 -e 0 dat -l dat/planes/planes.list |
|
to visualize the data. The result should look similur to this:
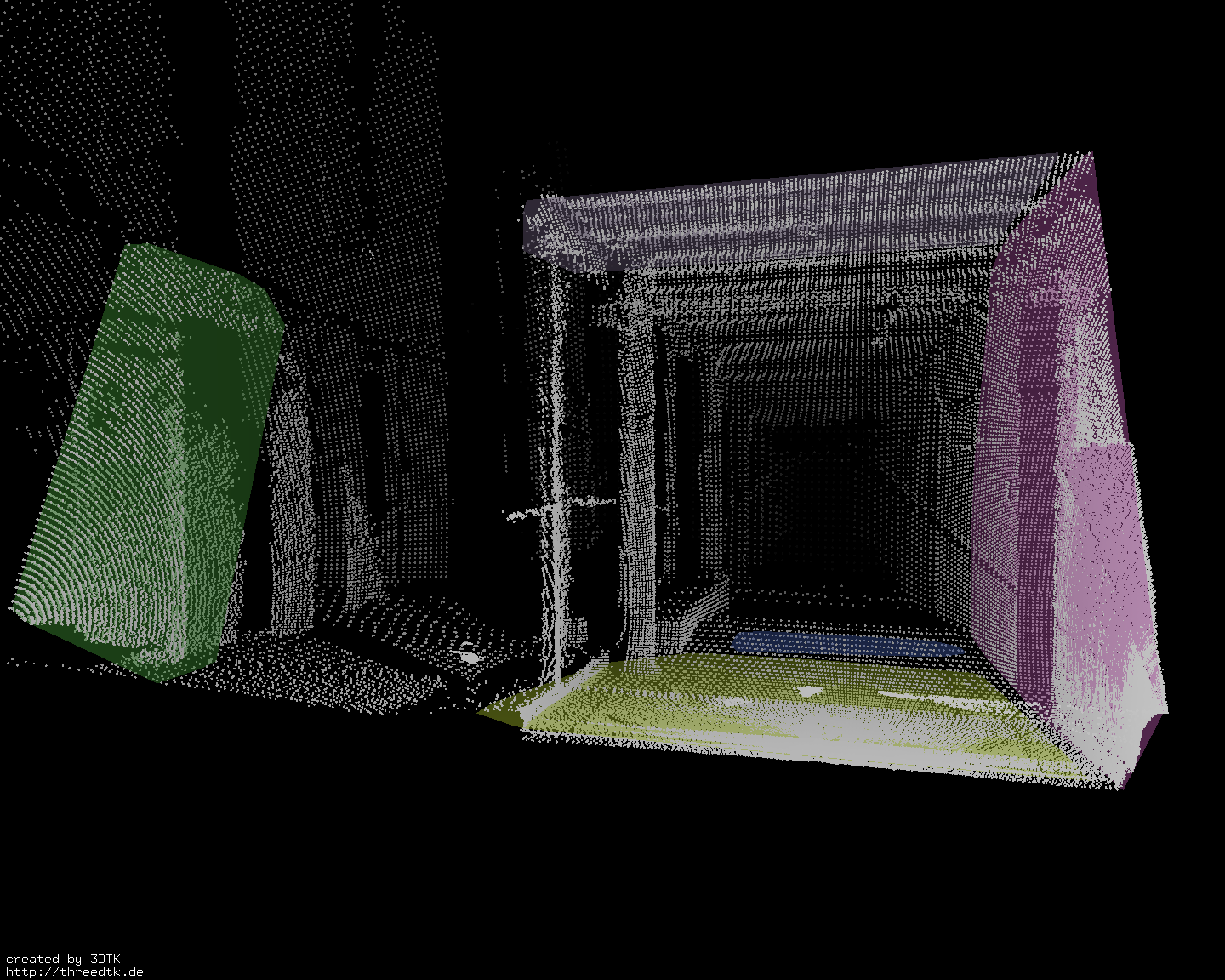
|
|
Informatics VII - Robotics and Telematics, Prof. Dr Andreas Nüchter, andreas (at) nuechti.de, Tel. +49-177-7951270