This parameter is for specifying where the scan should start so the data set registration will start from the first scan.
This parameter is for specifying where the scan should end so the registration is going to end after the 65th scan.
This is the point reduction parameter. It will reduce the points to a voxel size of 10.
This parameter specifies that there should be 100 iterations in the sequential matching.
This parameter specifies that the maximal distance of points that may form corresponding point pairs is 75.
Each iteration of the ICP algorithms minimizes the error between all point
pairs. This parameter specifies one of the stopping criteria of the algorithm.
If in subsequent iterations the difference of average distances between the
point pairs after matching falls below this value, the matching process is terminated.
The sequential matching of the data set contains some error. This parameter specifies the stopping criteria of the iteration. In this case, if the difference between two points is smaller than 0.00001, the iteration will stop.
This is the destination path for the folder containing the scans to be registered. This may vary depending on where you save the hannover1 data set.
To visualise or animate the data set you can refer to the show tutorials on
this page.
An example command for using show to graphically display the sequentially matched data set is:
This will display the sequentially matched data set starting from the 1st scan and ending on the 65th scan.
Below are shots of the output generated by show for the sequentially matched data set.
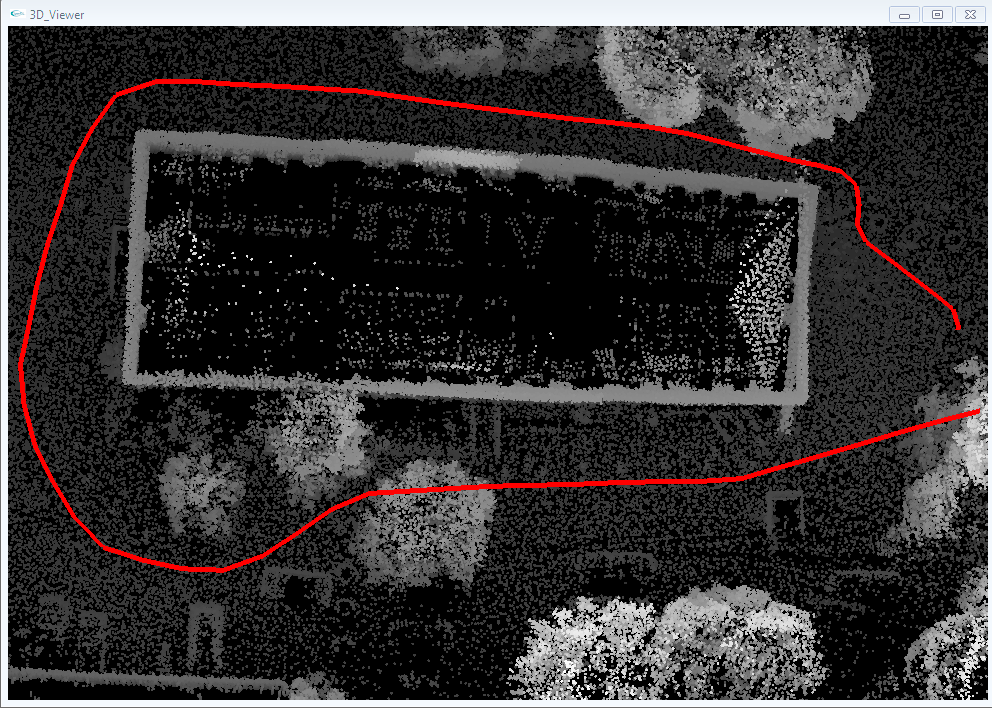
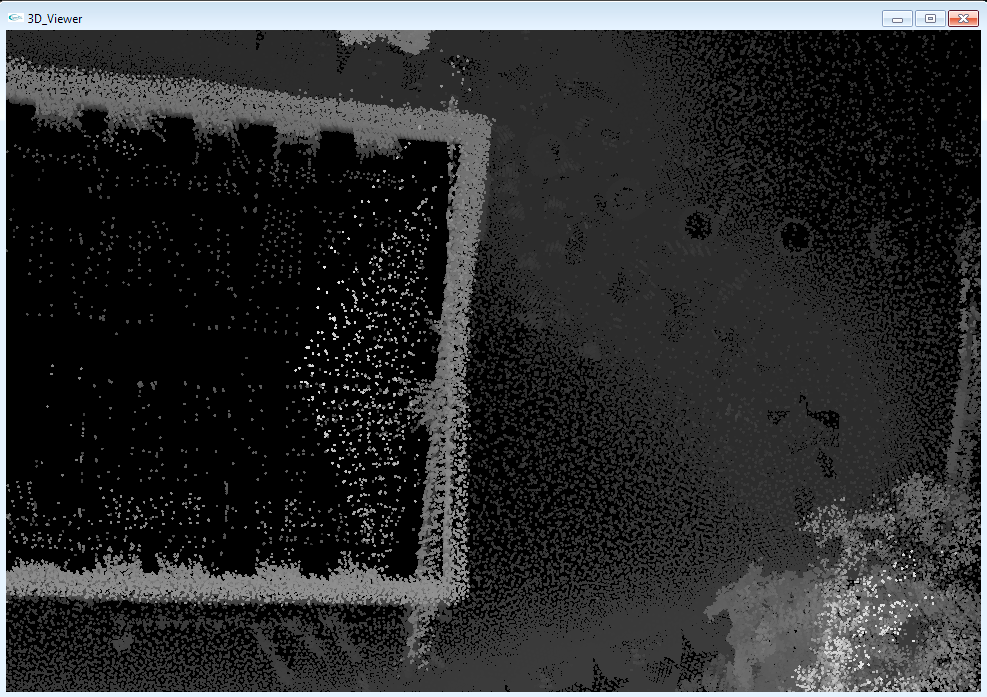
It can be seen from the second shot that there is an overlapping of the wall. This error can be removed by using
simultaneous matching to match the data set.
Related Publications
Andreas Nüchter, Jan Elseberg, Peter
Schneider, and Dietrich Paulus. Study of Parameterizations for the
Rigid Body Transformations of The Scan Registration Problem,
Journal Computer Vision and Image Understanding (CVIU),
Elsevier Science, Volume 114, Issue 8, pp. 963-980, ISSN 1077-3142,
August
2010. [Get
Paper (PDF)]
[Elsevier
Link with supplementary content].
Deyuan Qiu, Stefan May, and Andreas
Nüchter. GPU-accelerated Nearest Neighbor Search for 3D
Registration. In Proceedings of the 7th International
Conference on Computer Vision Systems (ICVS '09). LNCS 5815,
Spinger ISBN 978-3-642-04666-7, pages 194-203, Lìege Belgium,
October 2009. [Get
Paper (PDF)]
Oliver Wulf, Andreas Nüchter, Joachim Hertzberg,
and Bernardo Wagner. Benchmarking Urban Six-Degree-of-Freedom
Simultaneous Localization and Mapping.
Journal of Field Robotics (JFR), Wiley & Son, ISSN
1556-4959, Volume 25, Issue 3, pages 148 - 163, March, 2008, [Get
Paper] [Get
Videos].
Andreas Nüchter, Kai Lingemann, and Joachim
Hertzberg. Cached k-d tree search for ICP algorithms. In
Proceedings of the 6th IEEE International Conference on Recent
Advances in 3D Digital Imaging and Modeling (3DIM '07), IEEE
Computer Society Press, ISBN 0-7695-2939-9, pages 419 - 426, Montreal,
Canada, August 2007, [Get
Paper (PDF)] [HTML
Version].
Andreas Nüchter, Kai Lingemann, Joachim
Hertzberg, and Hartmut Surmann,
6D SLAM - 3D Mapping Outdoor Environments
Journal of Field Robotics (JFR), Special Issue on Quantitative
Performance Evaluation of Robotic and Intelligent Systems, Wiley
& Son, ISSN 1556-4959, Volume 24, Issue 8-9, pages 699 - 722, August
- September, 2007, [Get
Paper].
|
Informatics VII - Robotics and Telematics, Prof. Dr Andreas Nüchter, andreas (at) nuechti.de, Tel. +49-177-7951270