It can be seen that the command line for simultaneous matching contains all the
parameters for sequential matching and some additional parameters. Using these
parameters first sequential scan matching is performed as explained in the
tutorial on sequential
matching. Afterwards the GraphSLAM approach described in
RAS
and
This parameter specifies that the maximum point-to-point distance for matching should be 250.
This parameter specifies that the maximum number of iterations should be 50.
This parameter determines which scans are allowed to match against each other. In this case if the distance between two points is more than 750, they will not be matched against each other.
This parameter selects the algorithm for simultaneous matching. The default is set to 0 in which case no matching is done.
This is the destination path for the folder containing the scans to be registered. This may vary depending on where you save the hannover1 data set.
To visualise or animate the data set you can refer to the show tutorials on
this page.
An example command for using show to graphically display the simultaneously matched data set is:
This will display the simultaneously matched data set starting from the 1st scan and ending on the 65th scan.
Below are shots of the output generated by show for the simultaneously matched data set.
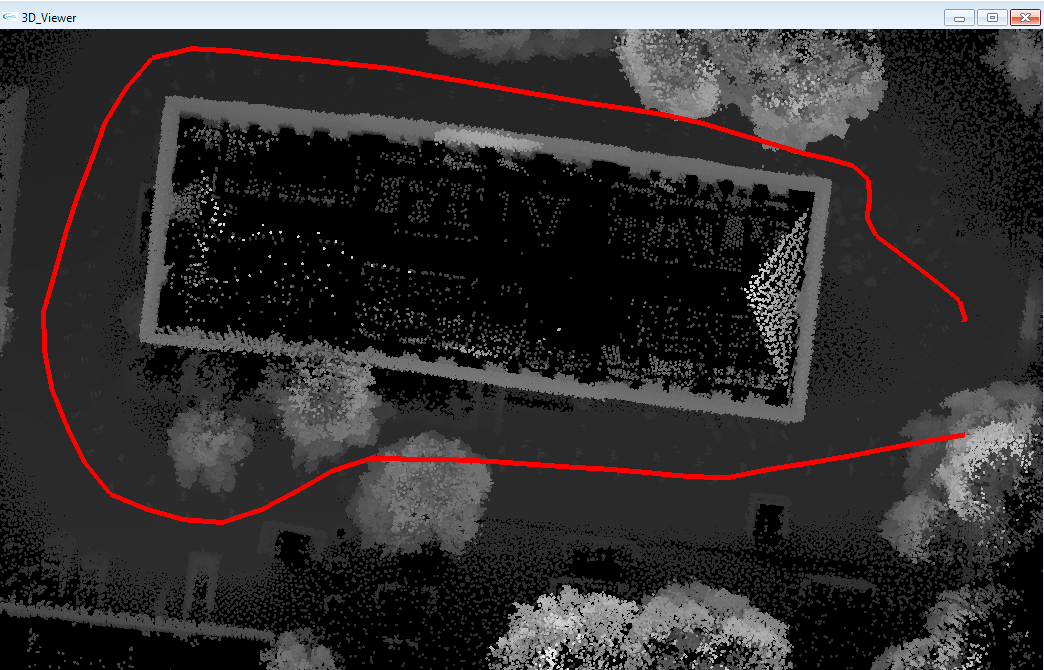
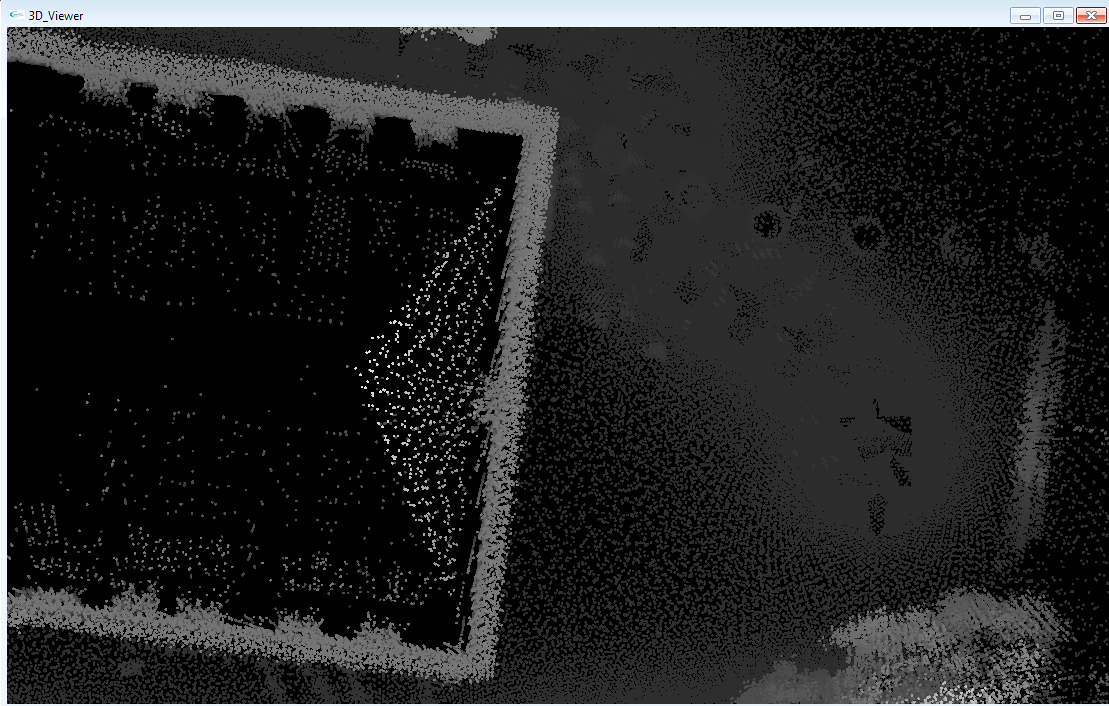
It can be seen from the second shot that the overlapping of the wall error in
the sequentially matched data set is removed in the global optimization.
Related Publications
Dorit Borrmann, Jan Elseberg, Kai Lingemann, Andreas
Nüchter, and Joachim Hertzberg.
Globally consistent 3D mapping with scan matching. Journal
of Robotics and Autonomous Systems (JRAS), Elsevier Science,
Volume 56, Issue 2, ISSN 0921-8890, pages 130 - 142, February 2008, [ScienceDirect
Link] [Get
Paper] [Get
Videos] [Addendum].
Andreas Nüchter, Jan Elseberg, Peter
Schneider, and Dietrich Paulus. Study of Parameterizations for the
Rigid Body Transformations of The Scan Registration Problem,
Journal Computer Vision and Image Understanding (CVIU),
Elsevier Science, Volume 114, Issue 8, pp. 963-980, ISSN 1077-3142,
August
2010. [Get
Paper (PDF)]
[Elsevier
Link with supplementary content].
Jochen Sprickerhof, Andreas Nüchter, Kai
Lingemann, Joachim Hertzberg. An Explicit Loop Closing Technique
for 6D SLAM, In Proceedings of the 4th European Conference on
Mobile Robots (ECMR '09), Mlini/Dubrovnic, Croatia, September
2009. [Get
Paper (PDF)] [Get
Videos].
Dorit Borrmann, Jan Elseberg, Kai Lingemann, Andreas
Nüchter, and Joachim Hertzberg. The Efficient Extension of
Globally Consistent Scan Matching to 6 DoF. In
Proceedings of the 4th International Symposium on 3D Data
Processing, Visualization and Transmission (3DPVT '08), June 2008.
[Get
Paper] [Get
Video] [Addendum].
|
Informatics VII - Robotics and Telematics, Prof. Dr Andreas Nüchter, andreas (at) nuechti.de, Tel. +49-177-7951270